LIRA
Su elaboración electrónica, es utilizando
dos sensores de interrupción infrarojo, colocado de manera vertical en cada una
de las columnas donde se encuentran las notas. Estos se activarán al tocar con
la baqueta, midiendo la distancia donde fue tocada hasta el receptor. Este
trabaja por reflexión. En donde cada nota tiene un rango de distancia especifica.
El sensor es INFRARED
PROXIMITY SHARP GP2Y0D21YK.
Asimismo se utiliza dos sensores
láseres que
al interrumpir su emisión cuando se toque con la baqueta, este me informa cual
fue la columna la cual tuvo contacto. Una vez hecho esto, y con la distancia
obtenida por el sensor de infrarojo se puede ubicar la nota que se toca, para asegurar que suene la que se desea.
Etapas
experimentales:
1.- Inicialmente, se
experimentó con el módulo “MC9S08QE128”, reconociendo su estructura y modelo,
asi como también las características
básicas de esta tarjeta (tales como corriente máxima de salida, voltaje máximo
de alimentación, entre otros), y su microprocesador incorporado el cual
permitió implementar la lógica y
procesamiento de las señales sensadas para el envío, mediante puerto serial, al
sintetizador elaborado. Con la implementación de una cdificacion se puede
condicionar lo que se espera en el instrumneto al momento de sonar, que luego
haría el funcionamiento sin problemas del mismo. Esta estructura programática
requiere de varios días de trabajo que se tuvieron que considerar.
2.- Al terminar con el reconocimiento
del micro, se pasó a caracterizar y comprobar cada uno de los sensores
utilizados para el desarrollo del instrumento que se propuso.
2.1.- Para los sensores de proximidad infrarojo
Sharp se estudiaron ciertas características.
2.1.1.- Características
·
Menos influencia en el color del objeto a detectar.
·
Detecta distancias de 10 a 80 cms.
·
Esta distancia es ajustable.
·
Un circuito de control externo es innecesario.
·
Supply voltaje (voltaje de alimentación): -0,3V a
+7V.
·
Voltaje del terminal de salida: -0,3V a 0,3 V.
·
Temperatura de operación: -10°C a +60 °C.
·
Voltaje de alimentación para operar: es de 4,55V a
5,5V.
·
El voltaje del terminal de salida, en alto: debe ser
mayor que 0,6V y menor que 1,9V.
·
El voltaje del terminal de salida, en bajo: es 0,6V
como valor máximo.
·
Diferencia del voltaje de salida: min: 1,65 V.
tipica: 1,9V. Y la máxima es de 2,15V
·
Características de la distancia de salida: min:
21cm; típica: 24 cm. Max:27 cm.
·
Corriente media: típica 30 mA., Max:40 mA.
·
Tiempo para detectar el objeto a medir.
La manera de
operar del sensor es que el aproximarse un objeto( en este caso la baqueta), en
el área de 12 cm de diámetro del haz de luz, este es detectado. Sin ser
necesario tocar la superficie donde se refleja. Entonces es a partir de la
aproximación que empieza a correr el tiempo de medición.
2.1.2.-Teoría
de Operación
Con la línea de detectores de GP2DXX SHARP, además
de detectar objetos a una distancia, se cuenta con nuevos rangos que ofrece mejor inmunidad a las condiciones
de iluminación en el ambiente.
Estos rangos todos usan triangulación y una matriz
lineal para calcular la presencia de objetos en el campo de visión. La idea
básica es:
Un pulso de luz infrarroja es emitida por el
emisor. Esta luz viaja en el campo de
visión, que bien golpea un objeto o sigue hasta el reflector.
EN el caso que se refleje un objeto, la luz
devuelve al detector y crea un triangulo entre el punto de la reflexión, el
emisor y el detector.
Los ángulos en
este triángulo varían en función de la distancia al objeto. La porción de
receptor de estos nuevos detectores es en realidad un lente de precisión que
transmite la luz reflejada en varias porciones de la matriz adjunta. Los
ángulos en este triángulo varían en función de la distancia al objeto. La
porción de receptor de estos nuevos detectores es en realidad un lente de
precisión que transmite la luz reflejada en varias porciones de la matriz
adjunta lineal basado en el ángulo del triángulo descrito anteriormente. La
matriz puede entonces determinar qué ángulo la luz reflejada vino de vuelta y
por lo tanto, se puede calcular la distancia al objeto.
Este nuevo método
de rango es casi inmune a la interferencia de la luz ambiente y ofrece una
increíble indiferencia al color del objeto a detectar. La detección de un muro
negro en plena luz del sol es ahora posible basado en el ángulo del triángulo
descrito anteriormente. La matriz puede entonces determinar qué ángulo de
la luz reflejada vino de vuelta y por lo
tanto, se puede calcular la distancia al objeto.
Este nuevo método de rango es casi inmune a la interferencia de la luz ambiente
y ofrece una increíble indiferencia al color del objeto a detectar.
La
detección de un muro negro en plena luz del sol es ahora posibleHay que tener en cuenta la
resolución del sensor es en centímetros.
Así como también que hay una
región de operación a utilizar, pues el sensor debe estar a una distancia de
6cm de separación al área en donde es detectado el objeto, que en el caso del
instrumento es la baqueta. Pues al obtener un ángulo de incidencia muy grande
que llega al receptor, la tensión de salida toma su máximo valor, saturándose e
impidiendo así una medición correcta.
Igualmente se tiene que utilizar
un circuito de filtraje RC, en la salida del sensor Sharp, pues la misma viene
con pulsos en su señal, con un alto contenido frecuencial. Que para obtener una
señal aproximada a DC se debe de filtrar ciertos de ellos a una frecuencia de
10Hz.
Este circuito es un Filtro Pasa
Bajo de aproximadamente una frecuencia
de corte de 10Hz, que experimentalmente es de 9,94Hz.
2.1.4.-Estudio de los tiempos en la implementación del sensor.
Asimismo, la duración mínima que es relevante para el sensor, que permanezca el objeto en ese sitio es de 4,8ms. Luego de esto, para que en el terminal de voltaje de salida sea mostrado un nivel alto, hay una duración de 1,9ms como medida mínima. Igualmente esto ocurre, cada vez que se toque con la baqueta.
Ahora haciendo una totalización de los tiempos tenemos:
Duración de medida mínima: 4,8ms. (Tiempo que dura el objeto en el área de detección)+ 1,9ms. Para que se muestre en la salida+ 3us. (Tiempo del conversor ADC) +40us.(Tiempo de simulación)+30us(Tiempo de Labview en abrir el .wav)=6,77ms.
Obteniéndose así un tiempo de latencia menor a 10 ms. Que es lo que se desea.
La frecuencias de muestreo debe ser igual: f. muestreo = 2 f. máxima, siendo igual 295,29 Hz. Para asi satisfacer el teorema de muestreo de Nyquist.
La familia de Sharp de infrarrojos detectores de distancias son muy populares para la robótica y la automática de aplicaciones de medición de distancias. Un inconveniente de estos sensores es que su respuesta no es del todo lineal. En otras palabras se produce en la señal de salida cuando esta está en alto, unos picos de gran potencial, que deben ser filtrados con un filtro pasa bajo con una frecuencia de corte de 10Hz.
Es importante resaltar que para acceder al micro controlador para trabajar con su conversor ADC y enviar lo medido, es necesario limitar el voltaje de 0V a 3V, en lo que respecta a la salida del sensor este no sobrepasa los 2,8V. Siendo este su Voltaje máximo.
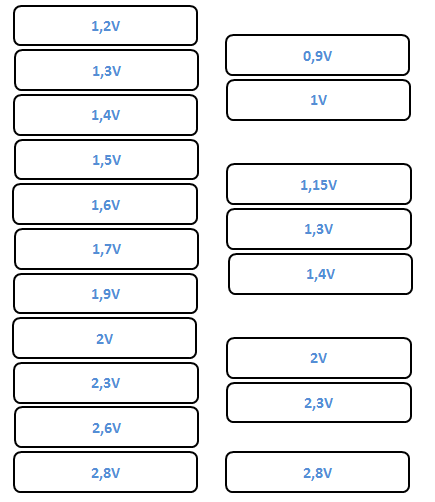
2.1.5.
Mediciones de voltajes de cada nota.
Se pudo observar que la variación fue alrededor de
99mV. Por cada nota.
La medición se realizo con el Oscloscopio por mas
precisión.
2.1.6. Data que condiciona cada nota en la codificación
SENSOR LÁSER
Asimismo,
se utiliza sensores laser, que al interrumpir su emisión cuando se toque con la
baqueta, este me informa cual fue la columna la cual tuvo contacto. Una vez
hecho esto, y con la distancia obtenida por el sensor de infrarojo se puede
ubicar la nota que se toca, para
prevenir que suene la que se desea.
Al
producirse la emisión de luz de laser, esta es interrumpida al tocar con la baqueta,
esto produce un cambio del valor de la impedancia de la fotoresistencia,
produciéndose a su vez una variación de voltaje. Luego esto entra a un
comparador de 5V que me permitirá saber si hubo una variación de voltaje y
finalmente pasa a un divisor de tensión limitándome mi voltaje de 0v a 3V,
permitiéndose la adquisición al
micro-controlador y así poder proteger al mismo de variantes de voltaje.
La señal es digital, que mientras haya emisión
de luz estará en alto, es decir en Vo=3V y al haber una interrupción esta
cambiara a 0,19V-0,2V.
El
potenciómetro me permite medir el valor de la resistencia que debe colocarse
para obtener el voltaje de comparación experimental asi como también me permite
calibrar mis voltajes a la salida.
Adicionalmente
en el emisor de luz se colocaron resistencias de protección de 100 ohms. Y un
switch que encenderá en paralelo a todos los láseres y es alimentado a 4V.
Igualmente
se utilizo un adaptador que envía mis salidas Vo al microcontrolador.
Y Para
garantizar la correcta alimentación del circuito se utilizo un regulador de 5V.LM7805CV
con la siguiente configuración.
Materiales a utilizar:
·
6 diodos laser.
·
6 foto resistencias como sensor laser.
·
6 LM311, comparadores.
·
9 Resistencias de 220 ohms.
·
6 Resistencias de 510 ohms.
·
6 Resistencias de 1Kohms.
·
6 Resistencias de 100ohms.
·
1 switch
·
2 Adaptadores de cables prolongados
·
LM7805CV
·
Capacitor 0.1uF
·
Capacitor 0.33uF.
visión general de la programación del instrumento.
Lira
Para
la lira se usara lasers y sensores de
proximidad los cuales emiten los datos referentes a la distancia ubicados en la
lira vía serial, mientras que los lasers
dirán en que sección de la lira se esta, izquierda o derecha.
La
información de los laser es adquirida por un circuito lógico de 6 entradas a 2 salidas
(dos laser por lugar de la lira) y las
salidas son ubicación de izquierda o derecha.
La
compuerta lógica a usar fue T4LS04 (OR).
Cada región de la
lira (izquierda o derecha) tendrá 3 lasers
los cuales dirán que se toco una tecla con esa región, luego con el
sensor de proximidad se determina en que parte teniendo entonces como
trasmisión al chip 2 pines de comunicación serial y dos pines de lugar. Esta información que llegara al puerto
c por comunicación serial una parte y por lectura de puerto la otra si se
tiene, será usada para emitir los datos de memoria de las octavas ya
previamente guardados, es decir si se tiene que se toco la parte izquierda a y
la tecla mas baja. La lógica binaria de lugar será 10 y se tendrá por puerto
serial la distancia a la que se y si el
rango del valor de la distancia está entre x y W valor, se escoge un pack de
memoria que contiene el numero del tono que se está tocando lo cual será
procesado por labview. Se necesitaría 2 byte del protocolo midi . El de
estatus y el dato del número de tono.